人工智能在自动驾驶中的应用与相关软件开发
自动驾驶技术,作为人工智能领域最具代表性的应用之一,正以前所未有的速度重塑未来交通。它并非单一技术的突破,而是依赖于一系列复杂的人工智能算法的协同工作。从环境感知到决策规划,再到精准控制,人工智能技术贯穿了自动驾驶的每个核心环节。
一、 人工智能在自动驾驶中的核心应用
- 环境感知与理解: 这是自动驾驶的“眼睛”和“大脑”的基础。通过车载传感器(如摄像头、激光雷达、毫米波雷达、超声波雷达)采集海量环境数据,人工智能算法,特别是计算机视觉和深度学习模型,负责对这些数据进行融合与解析。例如,卷积神经网络(CNN)能够精准识别和分类车辆、行人、交通标志、车道线等关键目标;多传感器融合算法能构建出车辆周围环境的精确三维模型,实现360度无死角感知。
- 高精度定位与地图构建: 结合GPS、惯性导航单元(IMU)和实时感知数据,AI算法(如基于深度学习的视觉SLAM)可以实现厘米级的高精度定位。车辆采集的数据可用于构建和实时更新高精度地图,为路径规划提供关键静态环境信息。
- 决策与路径规划: 这是自动驾驶的“智慧”所在。基于强化学习、深度强化学习以及各种预测模型,AI系统需要模拟人类驾驶员的决策过程。它不仅要规划出从A点到B点的最优路径,还要在瞬息万变的动态环境中,实时做出安全、高效、舒适的驾驶决策,例如跟车、超车、避障、并线等。决策算法需要综合考虑交通规则、乘员舒适度、行车效率等多重目标。
- 车辆控制: 决策指令最终需要通过车辆的控制系统(线控系统)来执行。AI控制算法(如模型预测控制MPC)负责将规划好的轨迹转化为精确的油门、刹车和方向盘控制信号,确保车辆平稳、准确地沿着预定轨迹行驶。
二、 人工智能应用软件开发的关键环节
支撑上述应用的,是一套庞大而复杂的软件工程体系,其开发过程极具挑战。
- 数据驱动的开发范式: 自动驾驶AI模型的性能极度依赖数据。软件开发流程始于大规模数据采集与标注,构建覆盖各种场景(日/夜、晴/雨/雪、城市/高速)的高质量数据集。随后是模型训练、验证与测试的迭代循环。开发团队需要构建高效的数据管理平台和自动化训练流水线。
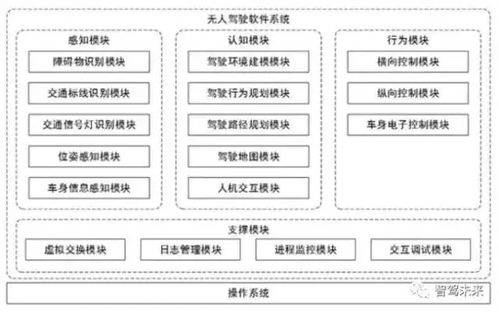
- 软件架构与中间件: 自动驾驶系统通常采用模块化、分层的软件架构,如感知、规划、控制等模块解耦。ROS(机器人操作系统)或其企业级变体(如ROS 2、Apollo Cyber RT)常被用作核心中间件,负责处理模块间复杂的通信、调度和数据同步,确保系统的实时性与可靠性。
- 仿真测试与验证: 由于实车测试成本高昂且存在安全风险,基于AI的仿真测试平台成为软件开发的关键工具。开发者可以在虚拟世界中创建海量、极端、危险的驾驶场景,对算法进行高效、安全的测试和验证,加速开发迭代,证明系统的安全边界。
- 安全与合规框架: AI软件必须嵌入功能安全(如ISO 26262)和预期功能安全(SOTIF)的设计理念。开发过程需要严格的代码规范、模型鲁棒性测试、冗余与失效应对机制,并确保系统的决策过程尽可能可解释、可追溯,以满足未来法规的合规要求。
三、 挑战与未来展望
尽管取得了巨大进展,挑战依然存在:长尾场景(罕见但危险的 corner cases)的处理、AI模型的可解释性与安全性、多智能体(车与车、车与路)协同决策、以及高昂的研发与部署成本。
人工智能在自动驾驶中的应用软件开发将朝着更强大的端到端学习能力、更高效的模型压缩与车载部署(边缘计算)、以及车路云一体化的协同智能方向发展。软件开发的核心也将从单一算法创新,转向构建完整、可靠、可大规模量产的系统工程解决方案。人工智能不仅是自动驾驶的技术引擎,其自身的应用开发过程,也正在推动着软件工程方法论向着数据驱动、仿真优先、安全至上的新范式演进。
如若转载,请注明出处:http://www.saic-lab.com/product/70.html
更新时间:2026-06-18 01:44:02